
Optional hardware preparation
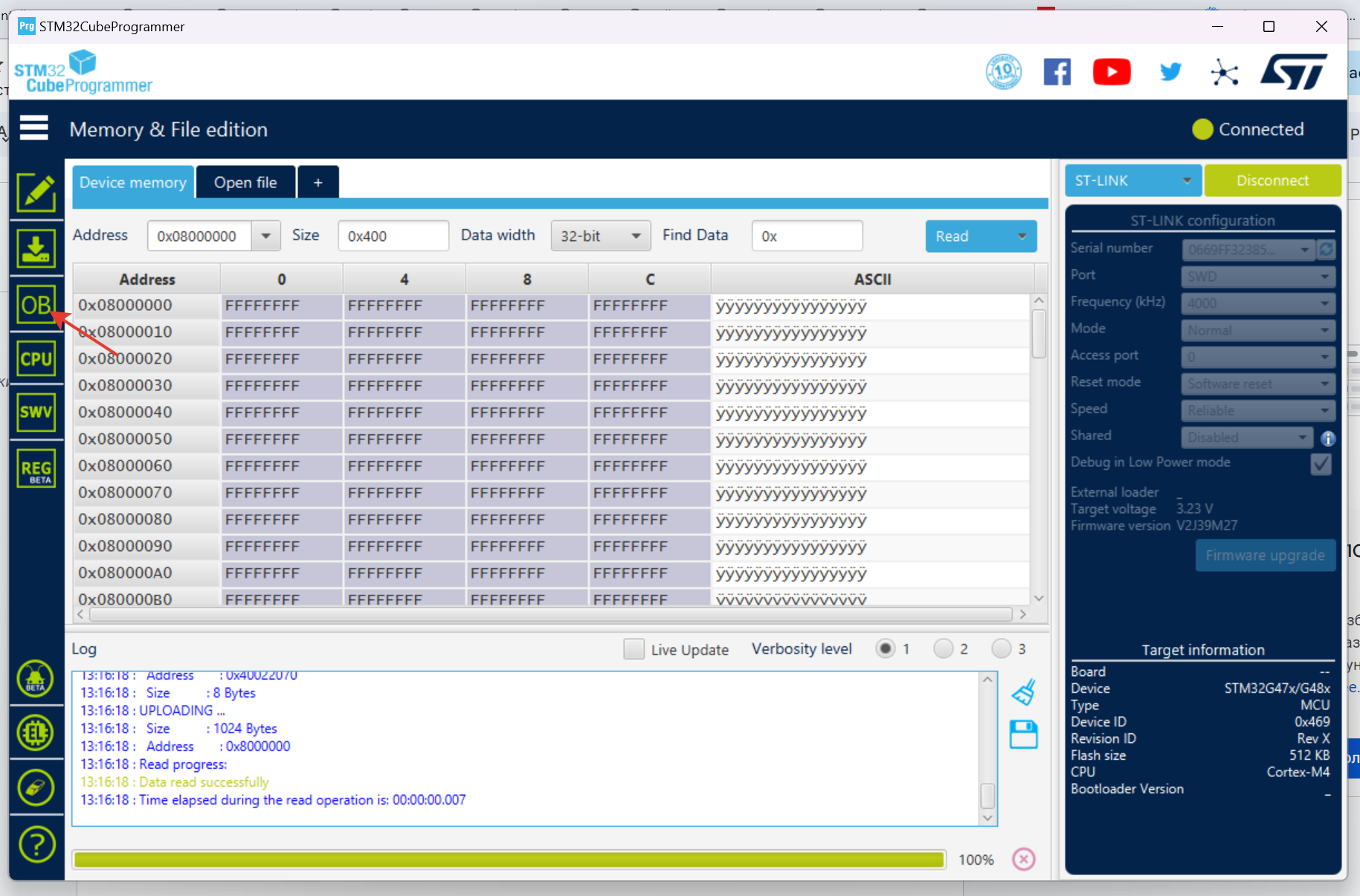
VB32G4 are normally ready for work straight out-of-the-box. However, let's check the configuration just in case. Connect the VB32G4 to the ST-LINK/V2 programmer and launch the STM32CubeProgrammer. Press the "Connect" button in the upper right corner. After successful connection go to the OB tab.
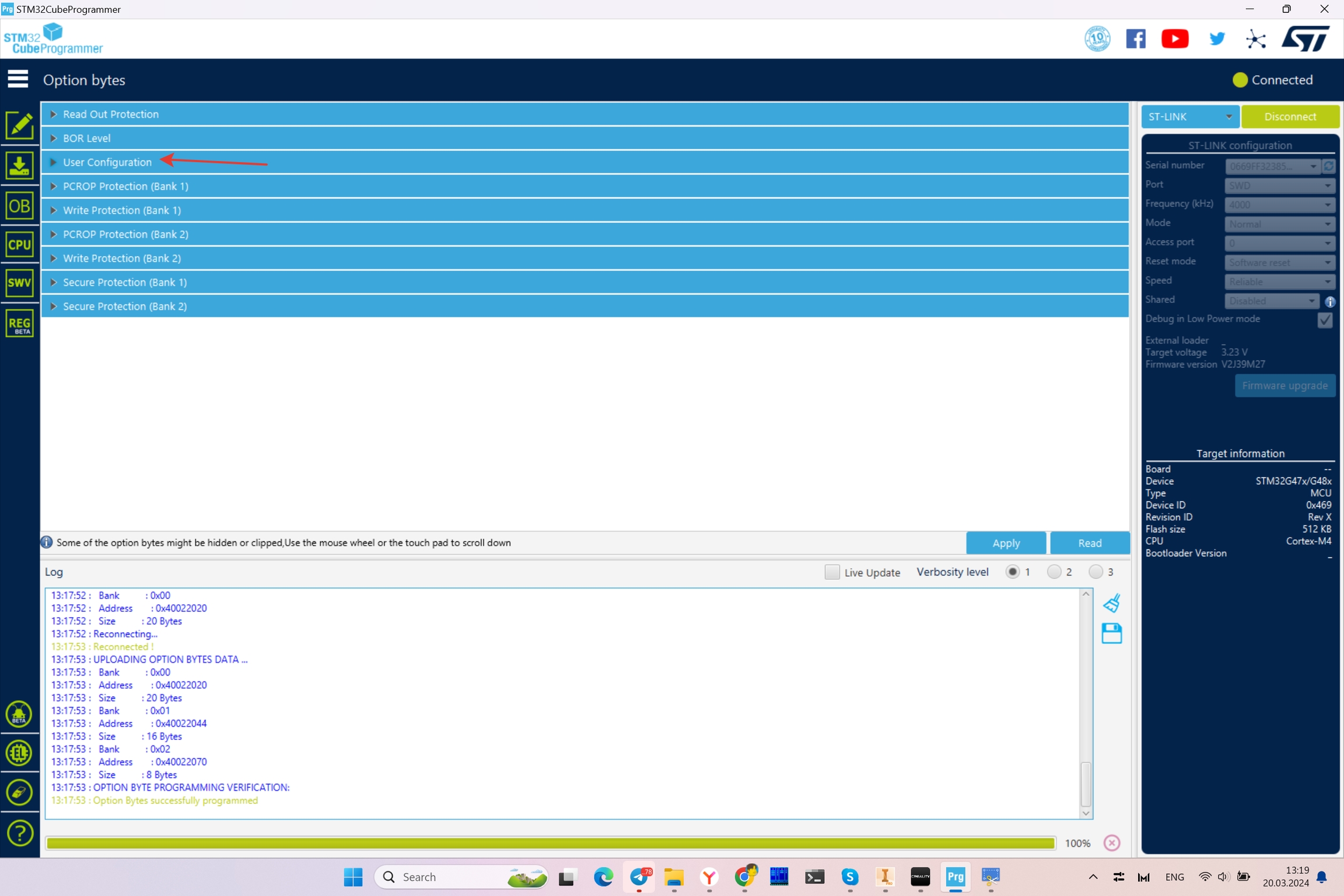
Open the User configuration menu.
Find the nSWBOOT0 parameter and make sure it is UNCHECKED.
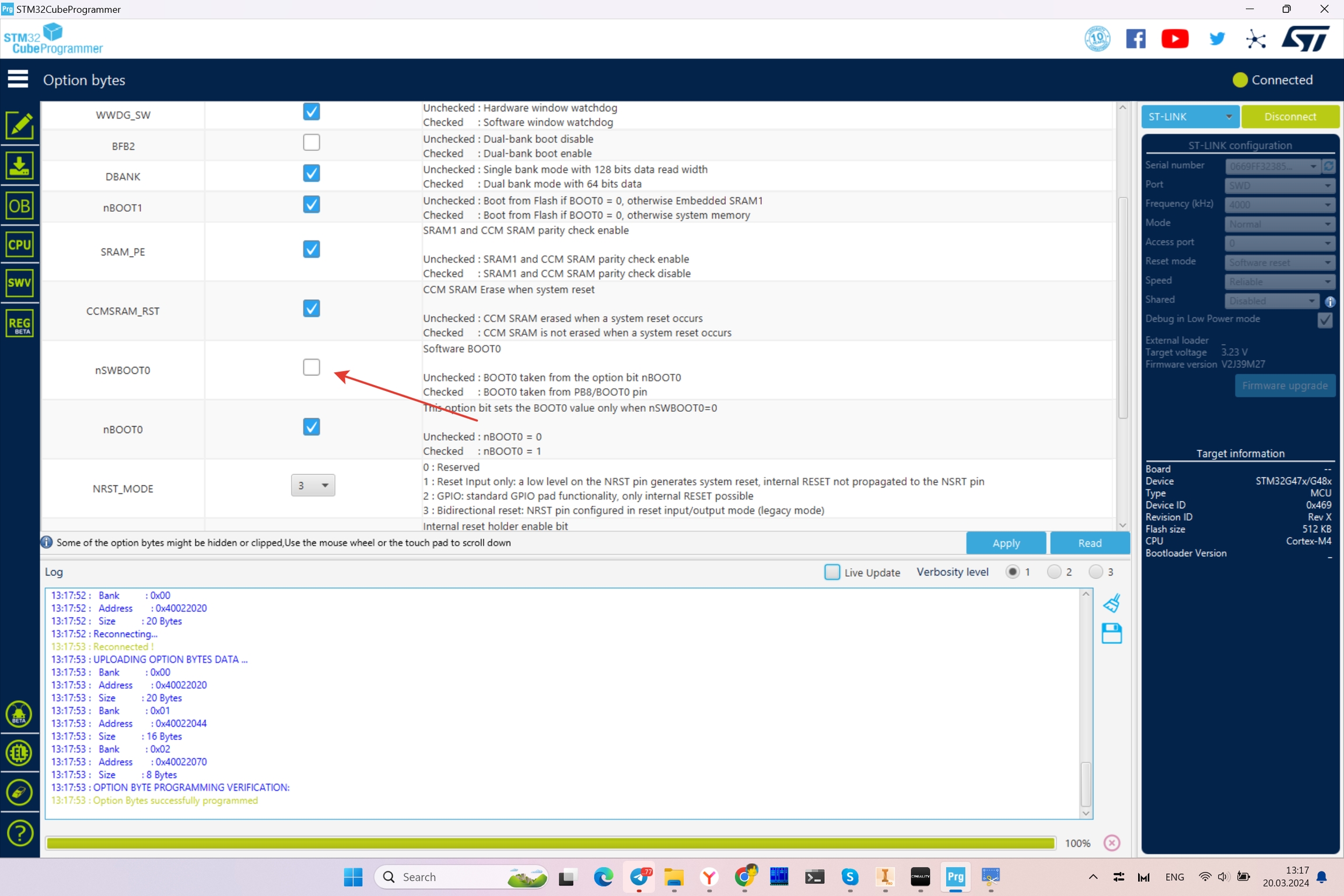
Click "Apply".
All done! You can click "Disconnect". The VB32G4 is ready to run your programs!
Last updated